Autonomous Rover Part 2: The MINDS-i 4X4 3-in-1 Robot and the FlySky FS-T6 Transmitter
Autonomous Rover Part 2: The MINDS-i 4X4 3-in-1 Robot and the FlySky FS-T6 Transmitter
Nov 06, 2017
Gerardo Ramos
The video above is just a quick overview of the parts that came with the MINDS-i 4X4 3-in-1 robot kit.
Design:
The MINDS-i Robot has finally arrived here at Boca Bearings. It's a fairly large package with many pieces. The package is shown below.
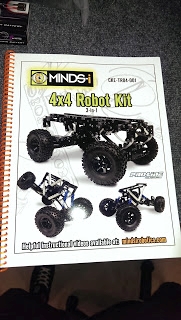
The robot has three different build options. The build options are seen on the front cover of the manual. The design that we are going to go with is the one shown below.

This design allows the most space on top to add the ArduPilot (APM) and the sensors that we are going to be using for this project. We might also add different functions to the robot so we need as much space as we can get. This design also gives a very high clearance to avoid any oncoming obstacles to the Rover.
Material List and Costs:
So the cost of this kit was $475. The kit included everything for a RC car build. The link to this kit is:
http://mindsirobotics.com/4x4-robot-3-in01-kit.html
One of the important things that came with the kit is the manual, shown below.
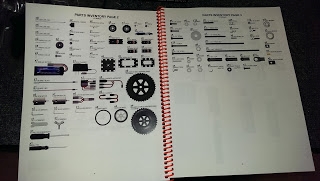
The manual has a couple of pages with a list of parts of the robot kit. This is important to be able to distinguish the parts. Some parts are very similar in shape. So this list can help with the confusion one can get.
The instructions were clear and in color to make things easier. The instructions remind of Lego instructions that I have seen in the past. I like to believe that I'm good at reading instructions, like DIYs for car maintenance, so I think I shouldn't have a problem assembling this Rover.

The kit included a battery for the Rover, a motor, and shocks as shown below. The shocks remind me of my coilovers that I have installed in my car. The way they seem similar to me are the collars found at the bottom of the shock. Adjusting this collar on my car increases or decreases the car's height, depending on which direction you're turning it.

This is a picture of the wheels along with their black rims. The wheels are pretty big and rugged for some off road driving. The rims in my opinion look pretty cool. The size of the rims are about 2.4 inches in diameter and the tires are about 4.7 inches.

Some tools were also included in the kit. Below, the steering servo is shown as well as the ESC for the motor. The metal parts are link arms for the Rover.

These are the other various parts that the kit included. There are many parts as you can see. You can see beams to build the frame of the rover as well as panel locks to lock the beams together. The panel locks come in different sizes as well the beams.

I'm pretty excited on building this Rover and learning about the frame as I go. I hope to learn things like the position of the shocks and their functionality, the steering setup, and the drive train of the Rover. I hope learning this can help me learn more about the design of an RC car or in general, vehicles. Maybe with what I learn about design with this project, I can design a frame of a small go kart in the future. In my opinion, the design of a vehicles frame is very important. It should be able to withstand the loads that it will face such as the weight of a person in a go kart. I guess for that part, one can use statics to make sure the frame can withstand the weight.
Another part that was purchased for this project was the FlySky FS-T6 transmitter from hobbypartz.com. The link to the transmitter is:
http://www.hobbypartz.com/79p-t6-6ch-radio-lcd.html
The price of the transmitter was $54.95. The shipping was pretty fast, it was the first thing to come from the parts that I have ordered for this project.


The transmitter has a nice blue back lit LCD display. This is my first time actually working with an RC vehicle and learning about transmitters. I referred to another post on this blog from Bryan to learn a little more about transmitters. The link to that post is:
https://www.bocabearings.com/blogs/2017/crossfire-3d-printed-quadcopter-part-3
With that post and with some researching on the web, I was able to hook up the FlySky transmitter with Bryan's Traxxas Slash. Here's a quick video of it.
So doing this helped me better understand the functions of the transmitter. The specific transmitter I have is a 6 channel transmitter. What I plan on doing with the fifth channel is to program it to be the Autonomous Mode channel. I'm going to assign the channel to one of the switches on the transmitter. When the switch is flipped, the Rover will go into autonomous mode and will then head to the waypoints that I will program into the APM. I also learned that you calibrate the the maximum and minimum throttle as well as the turning of the steering. You can reduce these parameters if you want to learn how to drive a fast RC car but at a slower speed and reduced steering.
So, those are the parts that have come in so far for this project. I am still waiting on the APM, GPS, and the ultrasonic sensors that I have ordered from 3drobotics.com. In the meantime, I will be working on assembling the rover. I'm really looking forward to working on it. I see it as a very complex Lego project that will become a pretty cool RC Rover.