Game of Drones Hiro Airframe Quadcopter Part 1: Building the Quadcopter
Game of Drones Hiro Airframe Quadcopter Part 1: Building the Quadcopter
Feb 23, 2018
Ben Flaum
Reposted From: http://bocabearingsworkshop.blogspot.com/2015/12/game-of-drones-hiro-airframe-part-1.html

This is the first time where I will try to learn and make a quadcopter. Parts from the Crossfire Quadcopter will be used to make this quadcopter with the Hiro Airframe from Game of Drones. The end result is shown above. An image of the frame alone can be seen below.

The Hiro Airframe that will be used for this quadcopter build
The four Turnigy Plush 40A from the Crossfire Quadcopter will be used.

A distribution board will be used to distribute power from a battery to the four ESCs.

The flight controller that will be used for this project will be the KK2.15 multi-rotor control board.

The transmitter and receiver that will be used will be the Turnigy TGY9X transmitter with its receiver.

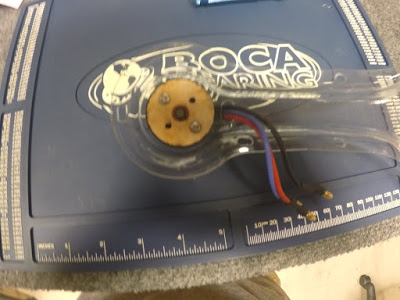
The motors that will be used will be the AX-2810Q motors with a KV rating of 750.

The bearings in the motor were replaced with orange seal bearings from here at Boca Bearings.

The four motors were mounted onto the frame by using the included wooden mounts with the frame.


The front of the frame is denoted by a sticker with the words "Game of Drones". Once the front of the frame is found, the front of the frame should be facing away from you. In this position, Arm 1 will be the top left arm. Arm 2 will be the top right. Arm 3 and 4 will continue in a clockwise fashion.
The next step will include the control board and the distribution board and combining them together.

The control board has an arrow that signifies the front side of the board.

The red and black wires from the distribution board should point into the same direction as the arrow on the control board and then be placed on top of the control board with the black foam facing up. The arrow on the control board should be at the bottom face of the control board.
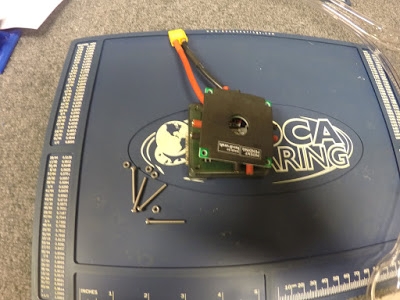
The distribution board will be held in place on top of the control board with the use of 4 2.5mm bolts with nuts. The nuts are on finger tight.
The next step will be changing the settings of the ESCs to be used for quadcopters. To change the settings of each ESC, a programmer card from Hobby King is used. The programmer card is meant to be used for Turnigy Plush ESCs.
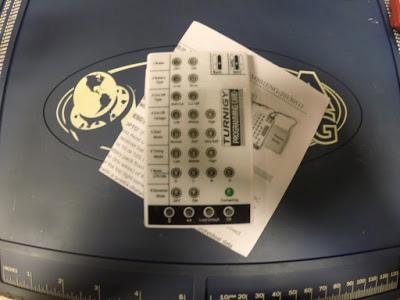
I followed the directions that came with the programmer on how to make the connections between the ESC and the programmer and how to change settings. I first connected the ESC into the top right port of the programmer. On the same end of the ESC were the wires came from to connect to the programmer, I connected the red and black wires to the distribution board. Once that was done, I connected a 3 cell 11.1V battery to the distribution board with the black one being connected first.

To change parameters of the ESC, you would use the up/down arrow button to go through the different parameters of the ESC. You would use the right/left arrows to change a parameter with the light on each setting moving to the right for each time you press the right/left arrow button. The final settings that I chose for these ESC are shown in the picture above. These settings were chosen based on a video that uses this programmer card. A link to the video can be found here.
Once the desired settings are set, to make them permanent you would press the OK button and a blue light will light up and go away to indicate the new settings have been entered.
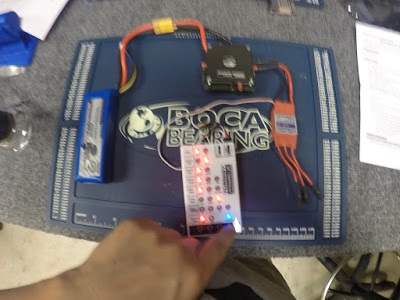
The distribution board isn't necessary to power the ESC. The ESC can be powered directly from the battery as shown below.

Once all ESCs have been calibrated/programmed, then the ESCs can now be connected to the distribution board as shown below. The red wires of the ESC would go into the red port on the distribution board and the black wire to the black colored port.

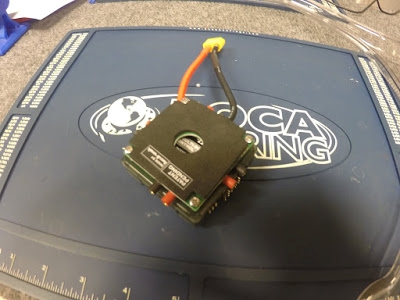
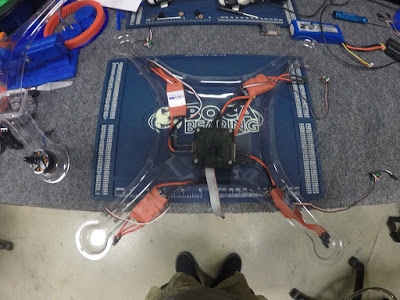
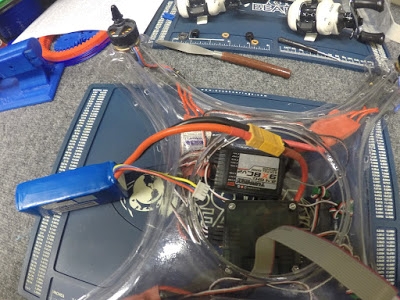
Once all ESCs are connected, the entire assembly will then be flipped so that the black foam will then be on the bottom. The assembly is then placed in the bottom side of the Hiro Airframe to get an idea of fitting of the parts.

The arrow on top of the controller should be pointed forward away from you and should be placed as close as possible to the center of the frame. Once a good position has been found, I decided to you velcro to place the controller onto the frame.

I placed the velcro on the bottom of the distribution board and then proceeded to place the boards in the bottom frame as seen below.

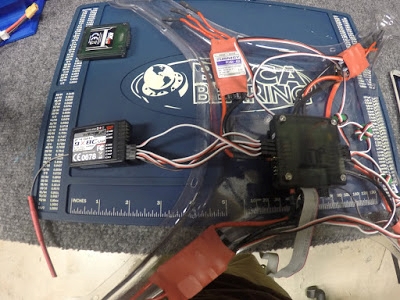
Once I had the flight controller board in place, the ESCs were then connected to the flight controller starting with the top left ESC connected into port OUT1 as motor 1. From there I proceeded to connected the ESCs clockwise from to port OUT 2, 3, and 4.

The next step was then to connect the receiver to the flight controller. Channel 1 on the receiver was connected to AIL on the flight controller. Channel 2 was connected to ELE. Channel 3 to THR and Channel 4 to RUDD. This can be seen below.
The next step will then to bring the top frame together with the bottom frame and hold them together but without actually sealing the two frame pieces together. At this time, the motors were connected to their respective ESC.



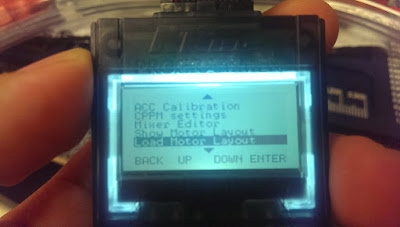
Once the motors are attached, it is time to use the flight controller and to choose the proper motor layout for the quadcopter. To do this, you must power the quadcopter with a battery. I used a Turnigy 3 cell 11.1V battery and connected it to the power distribution board. Once the quadcopter is powered, connect the programmer to the flight controller via the ribbon cable. From there go to the menu in the flight controller. Once there, scroll down until "Load Motor Layout" is selected and press Enter.
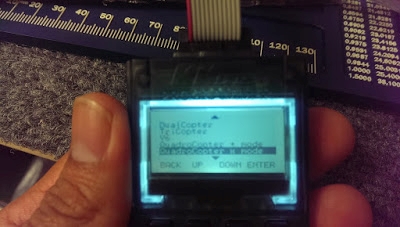
From there, scroll down until "Quadcopter X Mode" is selected and press enter.
It will ask you if you are sure, select Yes.

Then an image of the motor layout will be displayed along with their direction of rotation (clockwise or counter clockwise). Make sure the motors are connected as shown.
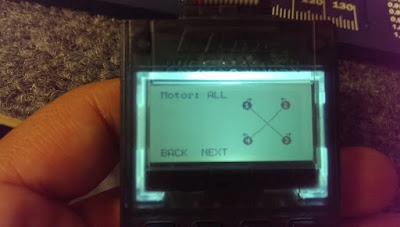
For example, make sure the top left motor is connected to OUT 1 on the flight controller. From here, the motors can then be tested if they are rotating in the right direction.
To test the motors, I first turned on the transmitter and then connected a battery to the distribution board to power the motors, receiver, and flight controller. To arm the quadcopter, I pushed the throttle stick (left stick) on the transmitter down and to the right. A loud beep should be heard and the word "ARMED" will be displayed on the programmer.

Giving some throttle would spin all the motors and when bringing it down you can see the spinning direction of each motor. Motors 1 and 3 should spin clockwise while motors 2 and 4 should spin counter clockwise. If for some reason a motor is not spinning in the correct direction, then you can simply switch any two of the three wires that connect the motor to the ESC. Doing this would reverse the spinning direction of the motor. I had to do this for two of the motors. To make it easier to see which direction the motors are spinning, you can tape a piece of paper on the outside of the motors.
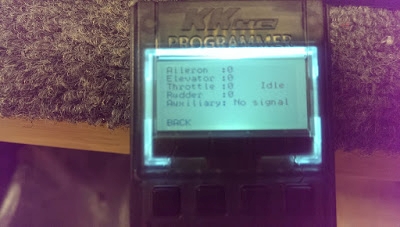
Once the motors have been set to spin in the right direction, it is time to do a receiver test on the flight controller. You would go to the menu and scroll to "Receiver Test" and then press enter.

From there you will see values and those values should change as you move the sticks around on the transmitter. Just make sure the direction displayed on the screen matches with the direction you are pressing the sticks to. If the direction is backwards, you may need to reverse the channel on the transmitter. It is also a good idea to make sure the values are set to 0 when the sticks are not being moved. If for some reason the values are not at 0 when simply at standby, then the trims on the transmitter can be used to adjust the values until they reach 0, as shown below.
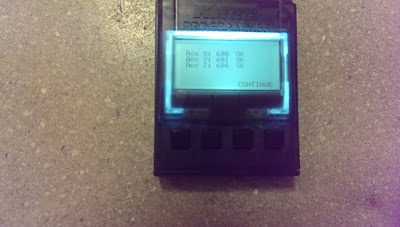
The next thing to be done is to do an accelerometer calibration. To do this right, make sure the quadcopter is on an even surface and that the flight controller is as flat as possible on the inside of the quadcopter. In the menu of the flight controller, scroll down until "ACC Calibration" is selected and press Enter.

Follow the directions displayed and don't move the quadcopter while the calibration process is being done. Once the calibration process is done, values will be displayed from the calibration.
Now the top and bottom frames can be temporarily be put together to do a simple test if the quadcopter can hover. I just used 4 zip ties around the frame to hold the two frame pieces together.

I then cut off the excess part of the zip ties. The next part will then be installing the propellers onto the motors. I had to do some quick googling to determine which propellers are the clockwise propellers and the counter clockwise propellers. After some googling I found this image that distinguishes between the two propellers.

In the image below, the propellers on the left side are the propellers for the motors that spin counter clockwise and the two propellers on the right are for the motors that spin clockwise.

Then I went ahead on put on the propellers on their corresponding motor. What the quadcopter looks like now is shown below. I also added some bubble wrap on the bottom of the frame to avoid any scratches when testing it inside the warehouse since it was currently raining outside.

The next step is now to do a hover test of the quadcopter to make sure the quadcopters lifts up without drifting or abnormal flying. I will cover the testing and the fixing that I needed to do to get the quadcopter up and running in another post.